Кафшери роботии Миг ---- Маҳалли кафшери сутуни чароғҳои кӯча
Индекс
1. Маълумот дар бораи порчаи кор
2. Баррасии ҳалли роботии кафшер
3. Раванди ҳалли роботии кафшер
4. Конфигуратсияи таҷҳизоти ҳалли роботӣ
5. Вазифаи асосй 6. Чорй намудани тачхизот
7. Монтаж, ба истифода додан ва таълим
8. Санҷиш ва қабул
9. Талаботи экологӣ
10. Кафолат ва хизматрасонии баъди фурӯш
11. Ҳуҷҷатҳои замимашудаи таҳвил
Видеои татбиқи кафшери роботӣ
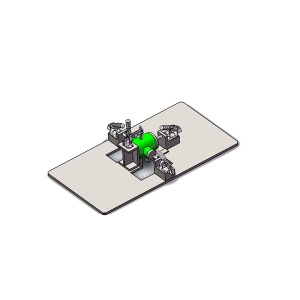
1, Маълумот дар бораи қисмҳои корӣ
-Диаметри сими кафшер: Ф1,2мм
-Раванди кафшер: кафшери муҳофизаткунандаи газ / кафшери Миг
-Навъи дарзҳои кафшер: навъи хати рост, навъи доира
-Гази муҳофизаткунанда:99% CO2
-Усули амалиёт: дастй бор кардану фаровардан, кафшери автоматии робот
-Хатогии насб кардан:≤ 0,5мм
-Тоза кардани табақ :дурахши металлй дар кафшер вадар доираи баландии ду маротиба дарз кафшер аз ҳар ду ҷониб
2, Маҳалли кафшери роботӣ Шарҳи
Бо мақсади баланд бардоштани самаранокии кор, мувофиқи вазъияти воқеии қисмҳои корӣ, заводи Honyen маҷмӯи стансияи роботҳои кафшериро пешниҳод мекунад, ки онҳоро бо асбобҳои гуногун иваз кардан мумкин аст, то бо маҳсулоти гуногун мувофиқ бошанд.Истгоҳи корӣ аз модели робот иборат аст: роботи кафшери HY1006A-145, манбаи барқи кафшерӣ, машъали кафшери махсус барои робот, шкафи назорати барқӣ ва тугмаҳо, хунуккунии об, ҷойгиркунакҳои дукаратаи истгоҳи корӣ, асбобҳои асбобӣ, девори муҳофизати бехатарӣ (ихтиёрӣ) ва ғайра қисмҳо.
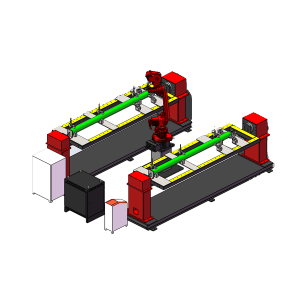
3,Муқаддимаи тарҳбандии истгоҳи роботии Mig Welding
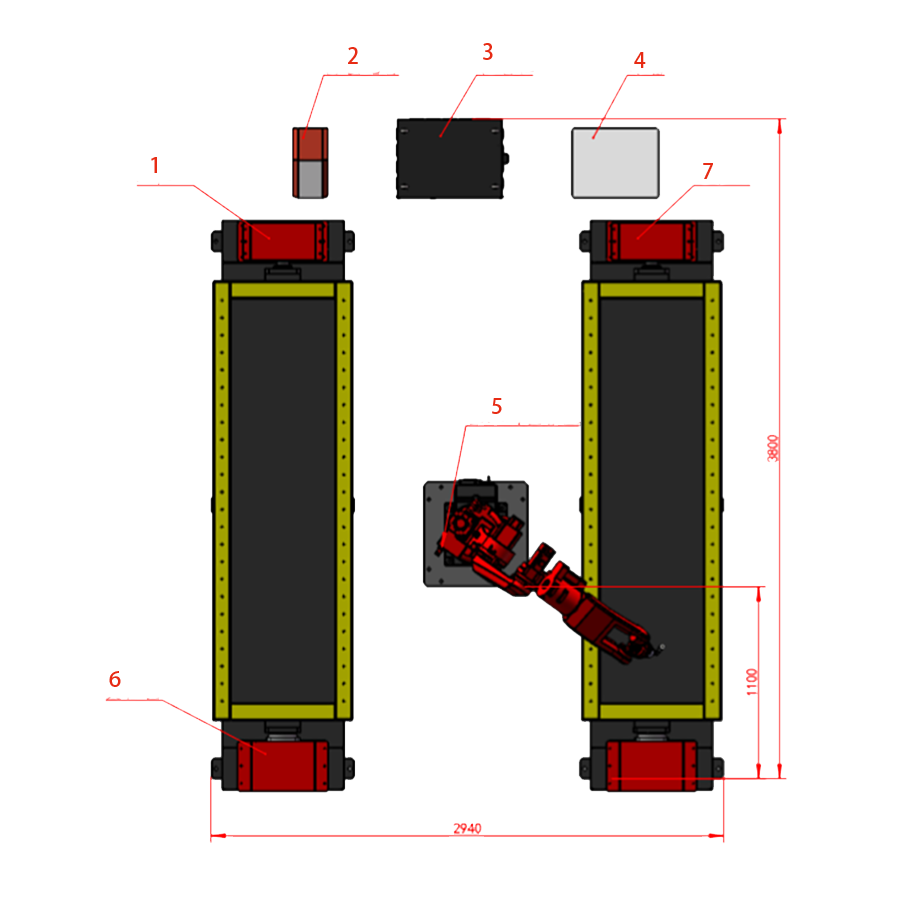
Layout коргоҳи кафшери камон робот Honyen
1, истгоҳи кории 1
2, Манбаи қувваи кафшер
3, Назоратчии робот
4, сардкунандаи об
5, Робот кафшери камон Honyen, HY1006A-145
6, Ҷойгиркунанда
7, участкаи корй 2
Қисмҳои сутунҳои барқӣ
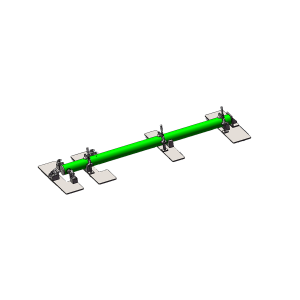
Қисмҳои сутунҳои барқӣ 2
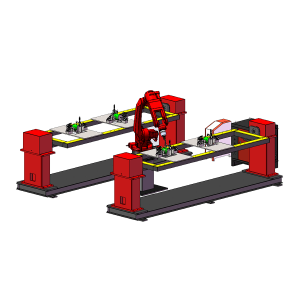
Қарорҳои кафшери роботӣ Тарҳ 1
Қисмҳои сутунҳои барқӣ 3
Қарорҳои роботии кафшер Тарҳ 2
Қарорҳои роботии кафшер Тарҳ 3
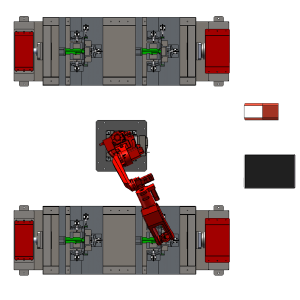
4. Раванди ҳалли роботии кафшер I. Оператор дар участкам 1 кор-гарро бор мекунад, Баъди бор кардан ва часпондани он.Оператор тугмаи оғози фармоиши роботро 1 пахш мекунад ва робот кафшери автоматиро оғоз мекунад;
II.Оператор барои бор кардани киемхои кор ба участкам 2 меравад.Пас аз боркунии қисмҳои корӣ, Оператор тугмаи оғози фармоиши роботро 2 пахш мекунад ва кафшери роботро интизор мешавад;
III.Баъди ба охир расондани кафшер дар участкам 1 робот программаи станцияи 2-ро ба таври автоматй ичро мекунад;
Ⅳ.Баъд Оператор дар станцияи 1 корхоро холй карда, ба нав кор мекунад;
V. сикли пайдарпай.
5. Конфигуратсияи таҷҳизоти ҳалли роботӣ
| Адад | Модели | Миқдор | Бренд | Мулохизахо | ||
| 1 | 1.1 | Бадани робот | HY1006A-145 | 1 маҷмӯи | Хониен | Аз он чумла корпуси робот, кабинети идоракунй, таълими барномасоз |
| 1.2 | Кабинети идоракунии робот | 1 маҷмӯи | ||||
| 1.3 | Манбаи қувваи кафшер | 1 маҷмӯи | Хониен | Кафшергари Мегмет | ||
| 1.4 | зарфи об | 1 маҷмӯи | Хониен | |||
| 1.5 | Машъали кафшери хунуккунии об | 1 маҷмӯи | Хониен | |||
| 2 | 1 Ҷойгиркунандаи меҳвар | HY4030 | 2 Танзим | Хониен | 2,5 м, 300 кг сарборӣ, 1,5 кВт қувваи баромади номиналӣ | |
| 3 | Станцияи назорати электрики | 2 Танзим | Хониен | |||
| 4 | Тарҳрезии система, ҳамгироӣ ва барномасозӣ | 1 маҷмӯи | Хониен | |||
| 5 | Девори бехатарӣ | 1 маҷмӯи | Хониен | Ихтиёрӣ | ||
6. Вазифаи асосӣ Бо мақсади таъмини сифат ва самаранокии кафшер, системаи роботӣ бо функсияи мукаммали худмуҳофизатӣ ва пойгоҳи додаҳои кафшери камон муҷаҳҳаз шудааст.Функсияҳои асосӣ инҳоянд:
Роҳи аслиро идома диҳед: вақте ки ҷараёни гази муҳофизаткунанда ғайримуқаррарӣ аст, сими кафшер ҳангоми кафшер сарф мешавад ва муваққатан қатъ мешавад, фармони "давом додани кафшер" метавонад мустақиман пас аз бартараф кардани мушкилот даъват карда шавад ва робот метавонад ба таври худкор кафшерро аз ҳама гуна мавқеъ то мавқеи боздошташуда идома диҳад.
Муайян кардан ва пешгӯии хатогиҳо: пас аз рух додани ҳушдор, робот аз дастгоҳи идоракунӣ маълумот мегирад, қисмҳои хатогиро тахмин мекунад ва рӯйхати қисмҳои хатогиҳои баландро дар навбати худ медиҳад, пайдарпайии иваз кардани ҷузъҳо ва ташхисро дар компютер нишон медиҳад, ки онро дар сайт бо кулбаи таълим дидан мумкин аст.Илова бар ин, компютер мунтазам маълумотро аз робот ба даст меорад, маълумоти бадастомадаро таҳлил мекунад, доварӣ мекунад, ки оё ҳолати кори робот мӯътадил аст ё не ва корбарро зуд бартараф кардани хатогиҳои дарпешистода.
Функсияи зидди бархӯрд: вақте ки машъали кафшери робот бо ашёҳои беруна бархӯрд мекунад, дастгоҳи зидди бархӯрди робот барои муҳофизати машъали кафшер ва бадани робот кор мекунад.
Пойгоҳи коршиносон: бо гузоштани шартҳои зарурии кафшер дар барнома, ин система метавонад ба таври худкор ҷойгиркунии дарзҳои кафшер ва танзими параметрҳои мувофиқи кафшерро анҷом диҳад.
Омӯзиш ва барномасозӣ: амалӣ кардани барномарезӣ дар сомона тавассути вимпел таълим.
Кафшергарии бофандагй: дар ҷараёни кафшер, робот метавонад на танҳо намуди кафшери маъмулии давриро ва инчунин навъи Z-ро дарк кунад.Ин ба робот кӯмак мекунад, ки функсияи кафшеркунии муштариро мувофиқи шакли порчаи корӣ амалӣ созад, то паҳнои дарзҳои кафшерро бо қувваи кафшер ва иҷрои хуби кафшер зиёд кунад.
Намоиши ҳолати: робот метавонад ҳолати кори тамоми системаи роботро тавассути вимпел таълим нишон диҳад, аз ҷумла ҳолати кори барнома, тағирёбии параметри раванди кафшер, тағирёбии параметри система, мавқеи кунунии робот, сабтҳои таърихи иҷро, сигналҳои бехатарӣ, сабтҳои ҳушдор ва ғайра, то муштариён тавонанд ҳолати системаи роботро сари вақт фаҳмед ва мушкилотро пешакӣ пешгирӣ кунед.
Файлҳои вуруд / баромад: файлҳои системаи робот ва файлҳои барномавӣ дар системаи робот метавонанд дар корти SD дар дохили контроллер робот захира карда шаванд ва инчунин метавонанд дар таҷҳизоти беруна захира карда шаванд.Барномаҳое, ки аз ҷониби нармафзори барномасозии офлайнӣ навишта шудаанд, инчунин метавонанд ба контроллери робот бор карда шаванд, Ин ба мизоҷон кӯмак мекунад, ки файлҳои системавиро мунтазам нусхабардорӣ кунанд, Вақте ки дар системаи робот мушкилот пайдо мешавад, ин захираҳоро барои ҳалли мушкилоти робот барқарор кардан мумкин аст.
7, Чорй намудани тачхизот HY1006A-145 роботи сермаънои дорои функсияи интеллектуалӣ мебошад.Он барои кафшери аз газ муҳофизатшаванда ва буриш мувофиқ аст.Хусусиятҳои он вазни сабук ва сохтори паймон аст.
Барои барномаҳои кафшери камон, Honyen як бозуи сабук ва паймонро бомуваффақият тарроҳӣ кардааст, ки на танҳо эътимоднокии аслиро таъмин мекунад ва инчунин иҷрои аълои хароҷотро амалӣ мекунад.
Honyen технологияи пешрафтаи серворо қабул мекунад, ки метавонад суръат ва дақиқии роботро беҳтар кунад, дахолати операторро кам кунад ва самаранокии корро барои кафшер ва буридани аз газ муҳофизатшуда беҳтар созад.
| Меҳвар | Сарбори | Такрорпазирӣ | Иқтидори барқ | Муҳити зист | Вазн | Насбкунӣ |
| 6 | 10 | 0,08 | 6,5 кВА | 0 ~ 45 ℃ 20 ~ 80% RH (намӣ нест) | 300 кг | Замин/шифт |
| Диапазони ҳаракат J1 | J2 | J3 | J4 | J5 | J6 | Сатҳи IP |
| ±170° | +80°~-150° | +95°~-72° | ±170° | +115°~-140° | ±220° | IP54/IP65 (дастӣ) |
| Суръати максималии J1 | J2 | J3 | J4 | J5 | J6 | |
| 158°/с | 145°/с | 140°/с | 217°/с | 172°/с | 500°/с |
Интерфейси мукаммали амалиёти чинӣ ва онро бо кори пурраи клавиатура ба забони англисӣ иваз кардан мумкин аст
Дастгирии муоширати гуногун, аз ҷумла интерфейси I / O, Modbus, Ethernet ва ғайра.
Дастгирии пайвастшавӣ бо роботҳои сершумор ва дигар таҷҳизоти беруна
Андозаи калон экрани сенсории ранга
Дастгоҳи танзимшудаи зидди бархӯрд, муҳофизати бозуи робот ва халалро коҳиш медиҳад
Назорати Robot Motion банақшагирии беҳтарини роҳро таъмин мекунад
Садҳо сумка ва функсияҳои дарунсохт барномасозиро содда мекунанд
Тавассути корти SD, нусхабардорӣ ва нусхабардории маълумот қулай аст
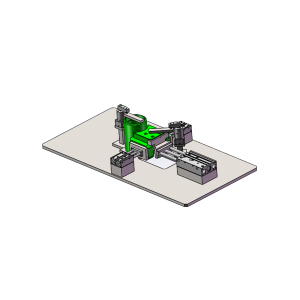
Ҷойгиркунанда

Ҷойгиркунандаи дукаратаи пуштибонии Honyen Head-дум, ки барои гардиши қисмҳои корӣ, ҳамкорӣ бо робот, расидан ба мавқеи хуб барои кафшер ва ноил шудан ба иҷрои хуби кафшер истифода мешавад
Манбаи қувваи кафшер

Megmeet Ehave cm 500h / 500/350 силсилаи сарбории пурраи саноатии рақамӣ * CO2 / MAG / MMA мошини кафшери интеллектуалӣ
8. Монтаж, ба истифода додан ва таълим
Пеш аз таҳвил, системаи робот дар ширкати мо ҷамъ карда мешавад ва пурра коршоямӣ санҷида мешавад.Фармоишгар қисмҳои худро ба ширкати мо барои кафшери озмоишӣ ва қабули пешакӣ пеш аз таҳвил мерасонад.Ҳангоми қабули пешакӣ операторони фармоишгар омӯзиши ибтидоии техникӣ мегиранд.
Нақшаи насб ва талаботҳои техникӣ 15 рӯз пеш аз насб ба фармоишгар пешниҳод карда мешавад ва фармоишгар бояд мувофиқи талабот сари вақт омодагӣ бинад.Ширкати мо муҳандисонро барои анҷом додани насб ва ба кор андохтани система дар сайти корбар мефиристад.Дар шарте, ки фармоишгар қисмҳои кориро ба қадри кофӣ таъмин намояд, вақт аз ба кор даровардани барномасозӣ, омӯзиши кадрҳо то истеҳсоли озмоишии оммавӣ набояд аз 10 рӯз зиёд бошад.Ширкати мо ба корбарони барномасозӣ, истифода ва нигоҳдории системаи роботҳо барои муштариён таълим медиҳад ва омӯзандагон бояд дониши ибтидоии компютер дошта бошанд.
Ҳангоми насб ва ба кор даровардан фармоишгар бояд асбобҳои заруриро, аз қабили таҷҳизоти борбардор, борбардор, кабелҳо, пармаҳои зарба ва ғайра таъмин кунад ва ҳангоми борфарорӣ ва насб кӯмаки муваққатӣ расонад.
Ширкати мо барои роҳнамоӣ, насб, ба истифода додани таҷҳизот ва омӯзиши оператор масъул аст.Ширкати мо барои нигоҳдорӣ ва омӯзиши истифода масъул аст.Оператор таҷҳизотро мустақилона идора ва нигоҳ медорад.Мундариҷаи омӯзиш: Принсипи сохтори таҷҳизот, ҳалли мушкилоти умумии электрикӣ, муқаддима бо дастурҳои асосии барномасозӣ, малакаҳои барномасозӣ ва усулҳои барномасозии қисмҳои маъмулӣ, муқаддима ва чораҳои эҳтиётии панели кори таҷҳизот, таҷрибаи кори таҷҳизот ва ғайра.
9. Санҷиш ва қабул
Кабули пешакй дар корхонаи мо бо иштироки коркунони дахлдори хар ду тараф гузаронда мешавад.Ҳангоми қабули пешакӣ, қисмҳои корӣ бояд мувофиқи дақиқии порчаи коркардшуда аз ҷониби фармоишгар санҷида шаванд, танҳо порчаи коркарди тахассусӣ кафшер карда шавад ва ҳисоботи санҷиши пеш аз қабул дода шавад.Пас аз анҷоми қабул, робот расонида мешавад.Бо максади пеш аз мухлат таъмин намудани кабули махсулот 3 дона кори муътадил дода мешавад.
10.Талаботи экологӣ Талаботи бехатарӣ: газ ва қисмҳои эҳтиётии аз ҷониби истифодабарандагон истифодашаванда бояд ба стандартҳои дахлдори миллӣ мувофиқат кунанд.
Манбаи ҳаво бояд дар беруни бино, на камтар аз 15 метр аз оташ ва на камтар аз 15 метр аз газ ва оксиген ҷойгир карда шавад.Манбаи ҳаво бояд шароити хуби вентилятсия дошта бошад ва дар ҷои салқин аз шамол дур бошад.
Пеш аз истифодаи робот, ҳама схемаҳои газ бояд тафтиш карда шаванд.Агар ихроҷи ҳаво вуҷуд дошта бошад, онро бояд таъмир кард, то боварӣ ҳосил кунад, ки хатогӣ вуҷуд надорад.
хангоми танзими фишор ва иваз кардани баллони газ оператор набояд дар даст моддахои равган дошта бошад.
намнокии муҳити зист: дар маҷмӯъ, намии муҳити зист 20% ~ 75% RH (дар сурати набудани конденсатсия);Кӯтоҳмуддат (дар давоми 1 моҳ) камтар аз 95% RH (ҳолатҳои бе конденсатсия).
ҳавои фишурда: 4,5 ~ 6,0 кгс / см2 (0,45-0,6 мпа), равғани филтр ва об, ≥ 100 л / дақ
Бунёд: ҳадди ақали қувваи бетонӣ C25 ва ғафсии ҳадди ақали таҳкурсӣ 400 мм аст
ларзиш: аз манбаи ларзиш дурӣ ҷӯед
Таъмини барқ: Таъмини барқи ҳама таҷҳизоти барқӣ ва электронии истеҳсолшуда 50 Гц (± 1) ва 380 В (± 10%) шиддати сефазавии AC-ро қабул мекунад, то заминабандии ибтидоии таъминоти барқро таъмин кунад.
Хизматрасониҳо дар сайт аз ҷониби муштариён пешниҳод карда мешаванд:
пеш аз тахеил тамоми корхои зарурй, ба монанди тахкурсй, корхои зарурии кафшеркунй, васл кардани асбобхои ёрирасон ва гайра.
борфарорй ва кашондани бор дар участкаи заказчй.
11. Кафолат ва хизматрасонии баъди фурӯш Мӯҳлати кафолати манбаи қувваи кафшер 12 моҳ аст.
Мухлати кафолати корпуси робот 18 мох аст.
Дар сурати нокомӣ ё осеб дидани истифодаи муқаррарӣ ва таҷҳизот дар давоми мӯҳлати кафолат, ширкати мо метавонад қисмҳои ройгони EXW-ро таъмир ё иваз кунад (ба истиснои масолеҳи масрафӣ, маҳсулоти нигоҳдорӣ, қубурҳои бехатарӣ, чароғҳои индикатор ва дигар маводҳои истеъмолии махсус аз ҷониби ширкати мо таъиншуда).
Барои қисмҳои осебпазир бидуни кафолат, ширкати мо мӯҳлати муқаррарии хидмат ва нархи таъминоти қисмҳои осебпазирро ваъда медиҳад ва таҷҳизот дорои канали устувори таъминоти таҷҳизот барои то панҷ сол аст.
Дар берун аз мӯҳлати кафолат, ширкати мо хидмати пулакии якумрӣ пешкаш мекунад ва дастгирии ҳамаҷонибаи техникӣ ва лавозимоти зарурии таҷҳизотро пешкаш мекунад.
12. Ҳуҷҷатҳои замимашудаи таҳвил Нақшаҳои васлкунӣ: нақшаҳои сохтмони таҳкурсии таҷҳизот ва нақшаҳои насби таҷҳизот
◆ нақшаҳои тарҳрезӣ: расмҳои асбобҳо ва таҷҳизот
◆ Дастур: дастури кори таҷҳизот, дастури нигоҳдорӣ ва дастури кори робот
◆ лавозимот: рӯйхати таҳвил, сертификат ва корти кафолат.



